











- Details
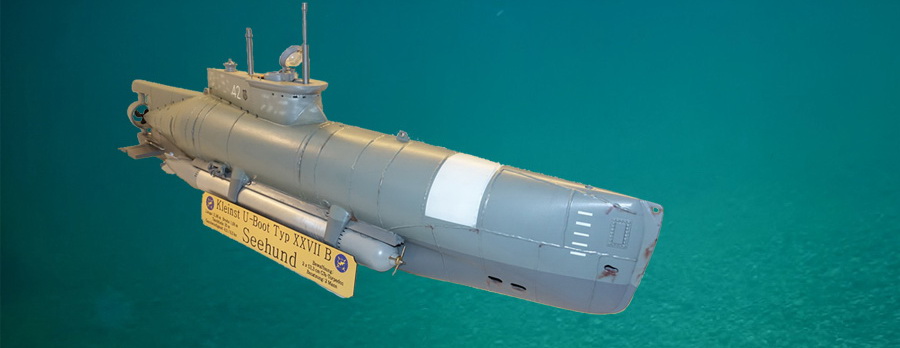
Kleinst U-Boot Seehund Typ XXVII
Ein weiteres U-Boot, welches mich auch schon immer fasziniert hat, ist der Seehund Typ XXVII. Ein Kleinst U-Boot der Deutschen aus dem 2. Weltkrieg. Es hat eine knuffige Form. Obwohl das U-Boot unter hohem Zeitdruck konstruiert wurde, ist den Ingenieuren hier ein toller Wurf gelungen und hat dem Vorbild hervorragende Unterwasserfahreigenschaften gegeben.
Ich hatte die Bauteile für ein Modell im Maßstab 1:15 im Frühjahr 2011 von Lapnet bei E-Bay ersteigert. Im Maßstab von 1:15 gibt es ein kompaktes, handliches Modell.
Bei Youtube findet ihr Videos von Lapnet zum Bau des ersten Modells. Ich hatte dann wohl den 2. Teilesatz (Reserveteile?) ersteigert, aus den man ebenfalls ein komplettes 2. Modell bauen konnte.

Um starten zu können, brauchte ich jedoch ein Tauchsystem welches in eine 80mm Röhre passt. Damit schied ein Tauchsystem von Engel aus, welches für ein 80mm Rohr zu groß ist. Und selbst bauen gibt meine Werkstatt nicht her. Es hat lange gedauert bis ich eine Lösung für einen Tauchtank gefunden hatte, welche mir zusagte.
Erst durch den Tipp von einem Modellbau Kollegen bin ich auf "Maximus Modellbau" von Danny Engelhardt aufmerksam geworden. Nach einer E-Mail und mehreren intensiven und spannenden Telefonaten war klar, dass ich hier fündig geworden war. Wir haben uns eingehend darüber unterhalten, wie ich das Tauchsystem in meinen Seehund einbauen könnte und was dazu benötigen würde. Danny Engelhardt hatte das Tauchsystem daraufhin speziell für meinen Seehund angepasst. Zusätzlich hatte er aus den Fräsdateien zu meinem Seehund Modell von Lapnet die fehlenden Teile zu meinem Bausatz gefräst.
An dieser Stelle vielen Dank an Danny Engelhardt von Maximus Modellbau.
Im Oktober 2017 lagen jetzt also alle Teile vor mir und ich konnte loslegen:

- Details
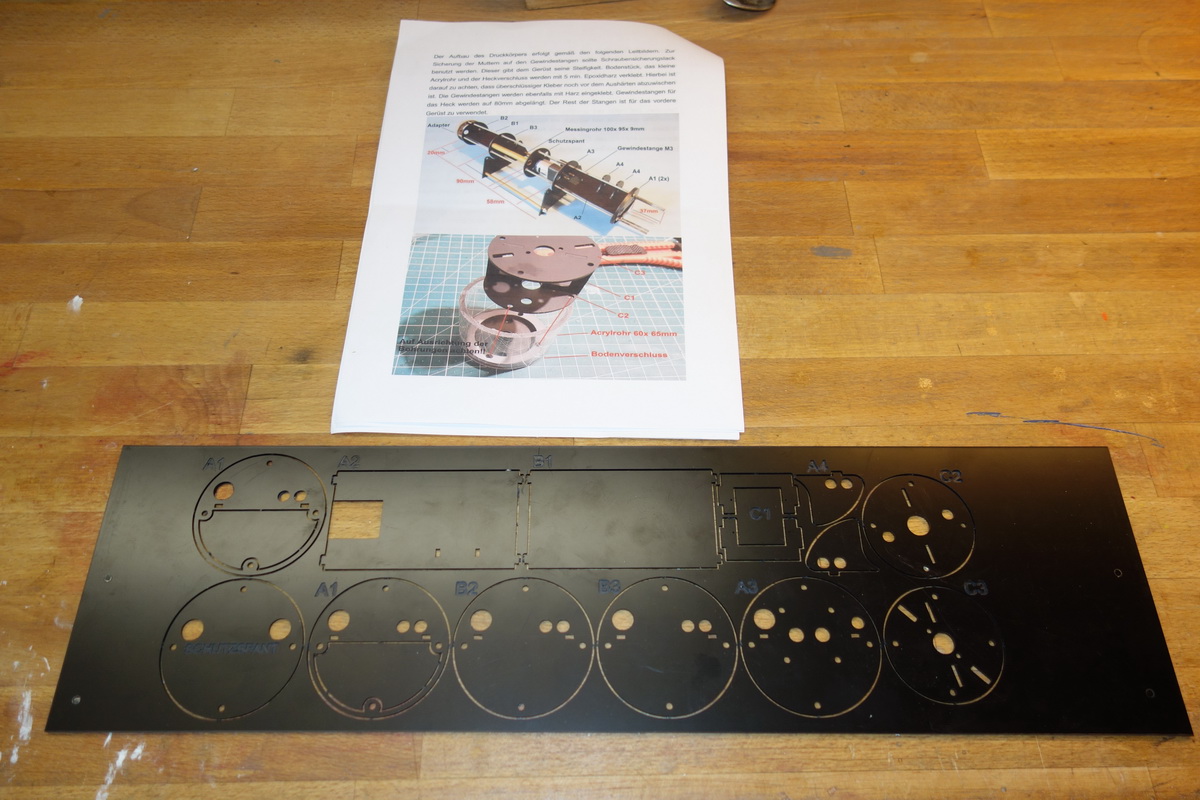
Teil 1: Oktober 2017 der Heckspannt
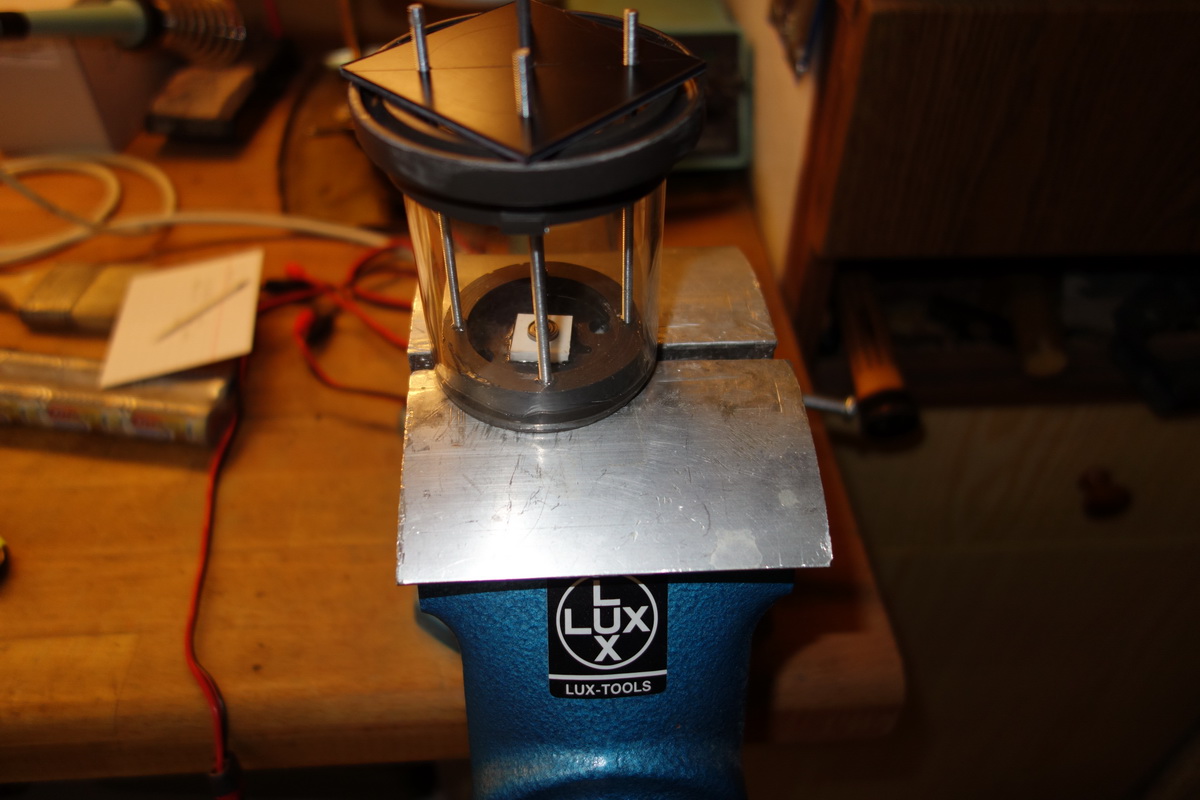
Als erstes ging es mit dem Heckspannt los. Wie in der Bauanleitung des Tauchsystems von Maximus Modellbau beschrieben habe ich die Teile mit 2K Kleber zusammengeklebt. Mein erstes Problem war die Antriebswelle. Da die Tauchröhre im Boot genau waagrecht liegt und das Loch im Heckspannt genau mittig ist, habe ich einen Versatz von 6mm zur Antriebswelle im Heck des Seehunds. Die Antriebswelle liegt etwas tiefer im Rumpf. Diesen Versatz wollte ich mit einem Getriebe lösen. Damit keine Schärkräfte auf den Simmerring kommen, welcher die Antriebswelle abdichtet, baute ich hinter dem Simmerring ein Kugellager ein. Die Welle hat 3mm, und das Kugellager hat 8mm Außendurchmesser. Normalerweise soll der Simmerring ebenfalls mit 2 K Epoxidharz verklebt werden. Ich probierte es mit "Plasti Dip" Flüssiggummi. Wie ich das gemacht habe, sieht man gut auf dem Bild 40:
 |
 |
 |
| Bild 20 | Bild 30 | Bild 40 |
Weiter ging es mit dem Hauptspannt des Technikgerüstes und dem Motorspannt. Das ging alles problemlos nach Bauplan. Es dauerte halt nur eine Weile bis man die Muttern am richtigen Platz hatte und die Spannten im Winkel und Abstand sauber stimmten. Hier musste ich sehr sauber arbeiten damit alles richtig ausgerichtet war und das Technikgerüst im Winkel und gerade ausgerichtet war. Verspannungen durch unsauberes Ausrichten der Spannten hätten dazu geführt, dass das Technikgerüst sich nicht gut in die Röhre schieben lässt.
 |
 |
 |
| Bild 50 | Bild 60 | Bild 70 |
- Details
Teil 3: Nov/Dez 2017 Die Rumpfteile verbinden
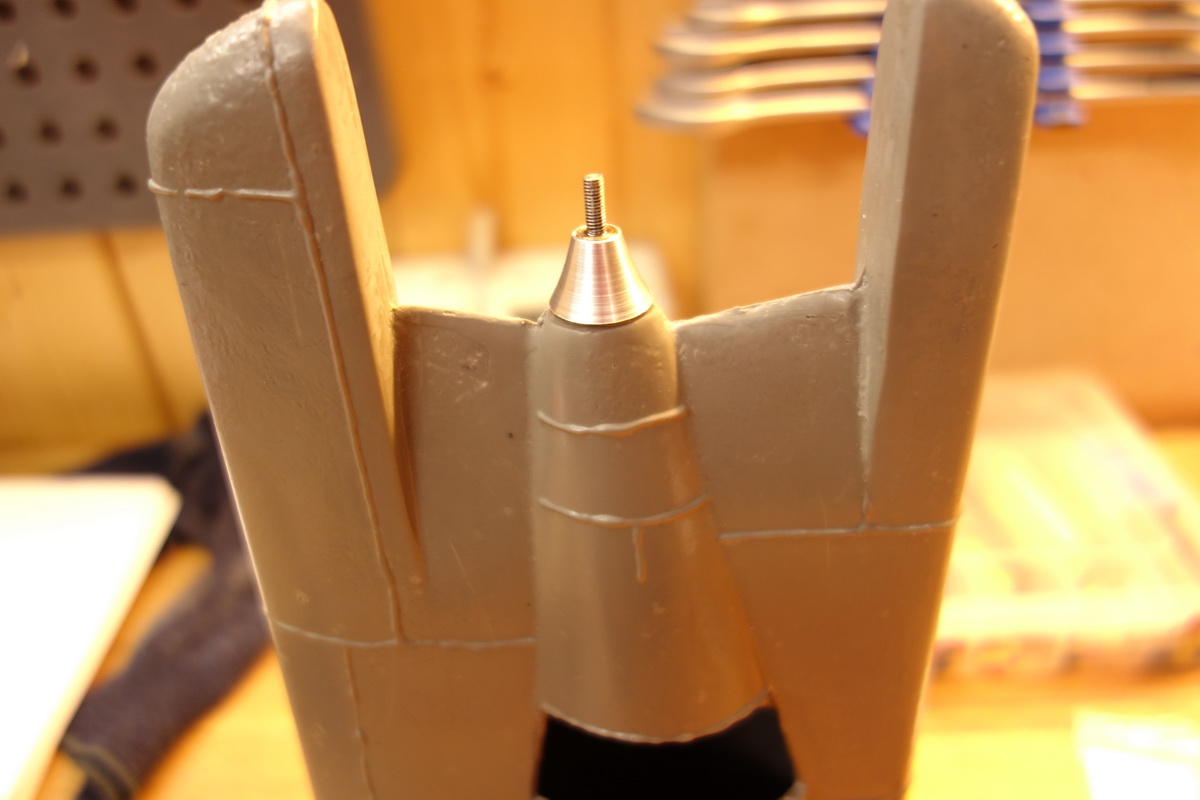
Als nächstes drehte ich eine Kappe als Abschluss für das Stevenrohr. Das Teil habe ich aus Alu-Rundmaterial auf meiner kleinen Drehbank hergestellt.
 |
| Bild 160 |
Eine Idee, welche ich mit Danny Engelhardt diskutiert hatte, war die beiden Rumpfteile mit Magneten zu verbinden. Da die Bugsektion einfach über den Druckkörper geschoben wird, sind die beiden Rumpfteile in der Längsachse fixiert (Bild 180). Man muss nur noch sicherstellen, dass Heck und Bug beieinanderbleiben. Diese Aufgabe sollten nun die Magnete übernehmen. Auf den Bildern sieht man gut, wie ich die Magnete in die beiden Spannten eingearbeitet habe. Ein Test zeigte, dass es wirklich gut funktioniert.
 |
 |
| Bild 170 | Bild 180 |
 |
 |
| Bild 190 | Bild 200 |
Jetzt war der Rohbau des Bootes schon sehr weit fortgeschritten und nachdem ich die Tauchtechnik eingebaut hatte, konnte ich die ersten Tests in der Badewanne machen. Dabei zeigten sich nun einige Probleme:
Durch das Stevenrohr und über den Deckel im Bug entwich Luft. Die Idee den Rand am Bugdeckel des Technikgerüst abzuschleifen, war keine gute Idee. Die Tauchtechnik war so nicht dicht. Wie sollte ich das lösen?
Auch hat mir die Konstruktion mit dem Schalter im Bugdeckel nicht gefallen, weil ich so beim Auseinanderbauen zwei Kabel vom Bugdeckel zum Technikgerüst hatte. Irgendwie war ich mit dem ersten Versuchen ziemlich unzufrieden. Also erst mal überlegen wie ich weiter machen sollte.
Bei mir im Keller gab es noch einige Boote, die eine Reparatur brauchten. Also legte ich eine kreative Pause ein. Diese sollte allerdings bis zur Messe in Friedrichshafen im November 2019 dauern. Als mich ein Freund im Nov. 2019 auf der Messe fragte, ob er den Seehund zur nächsten Messe im Jahr 2020 als Ladegut für seinen LKW bekommen könnte, da war meine Lust weiterzubauen wieder geweckt. Ich sagte zu. In der Zwischenzeit hatte ich auch Ideen entwickelt, was ich so an meinem Seehund besser machen wollte, um die Probleme in den Griff zu bekommen.
- Details
Teil 2: November 2017 Technikgerüst einpassen
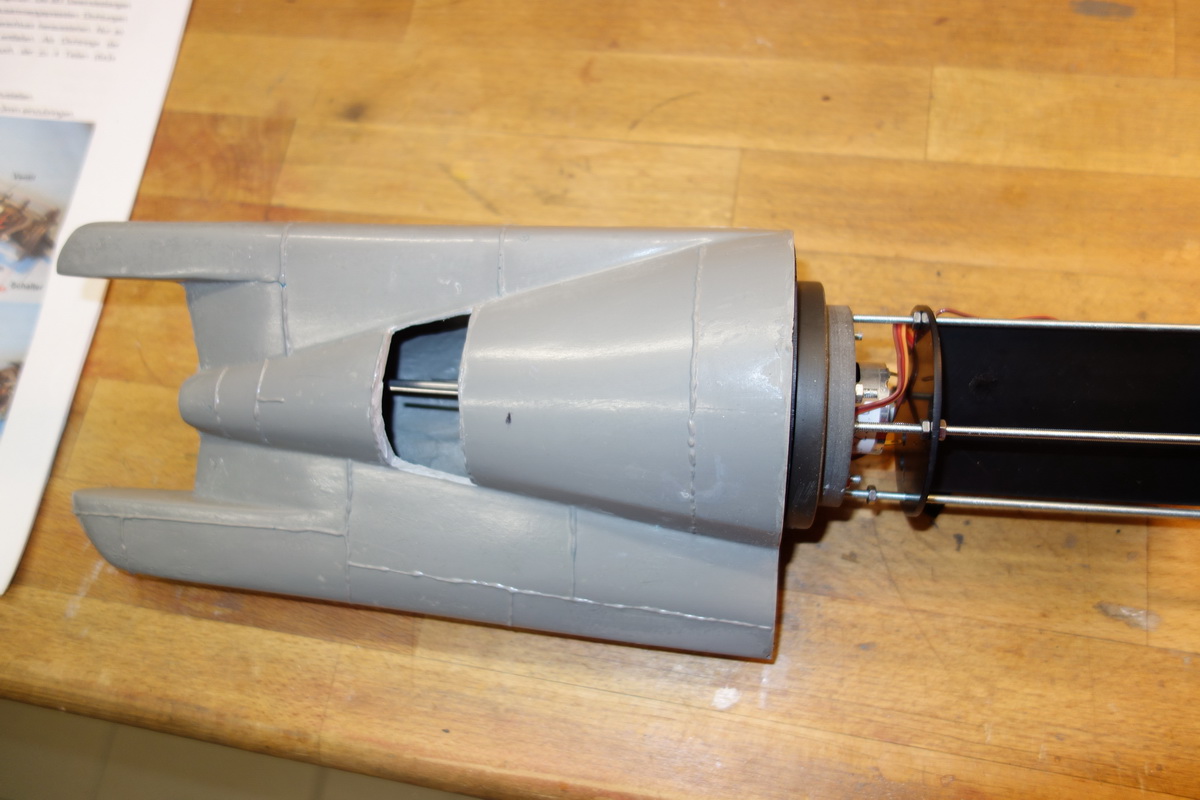
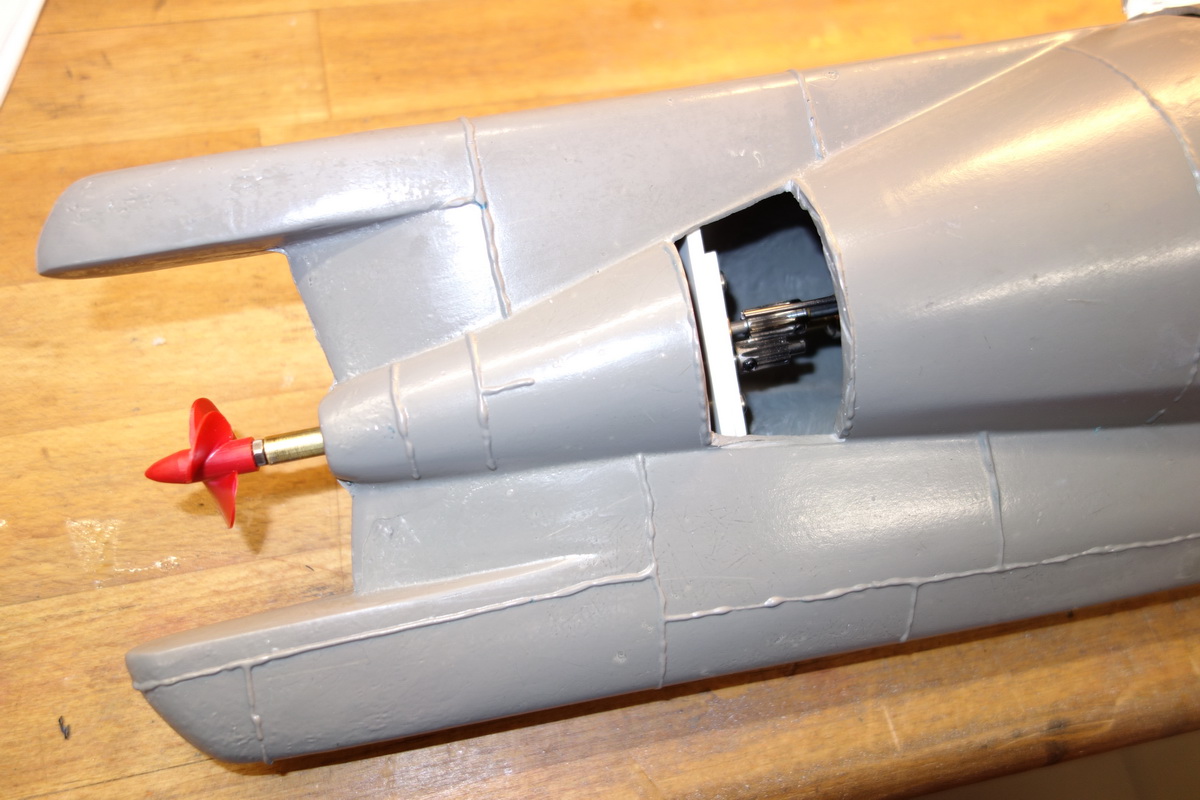
Im nächsten Schritt wurde das Technikgerüst in das Heckteil eingepasst. Im Heck-Spannt sind Kerben, in die man das Technikgerüst wie in einen Bajonettverschluss einschieben kann. In die Hecksektion habe ich eine Öffnung geschnitten, um an die Antriebswelle und an die Ruderansteuerung hinter dem Heckspannt heran zu kommen. Ob und wie ich das wieder zu bekommen sollte, so dass es auch noch gut aussieht, beschreibe ich in einem späteren Teil.
 |
 |
| Bild 080 | Bild 090 |
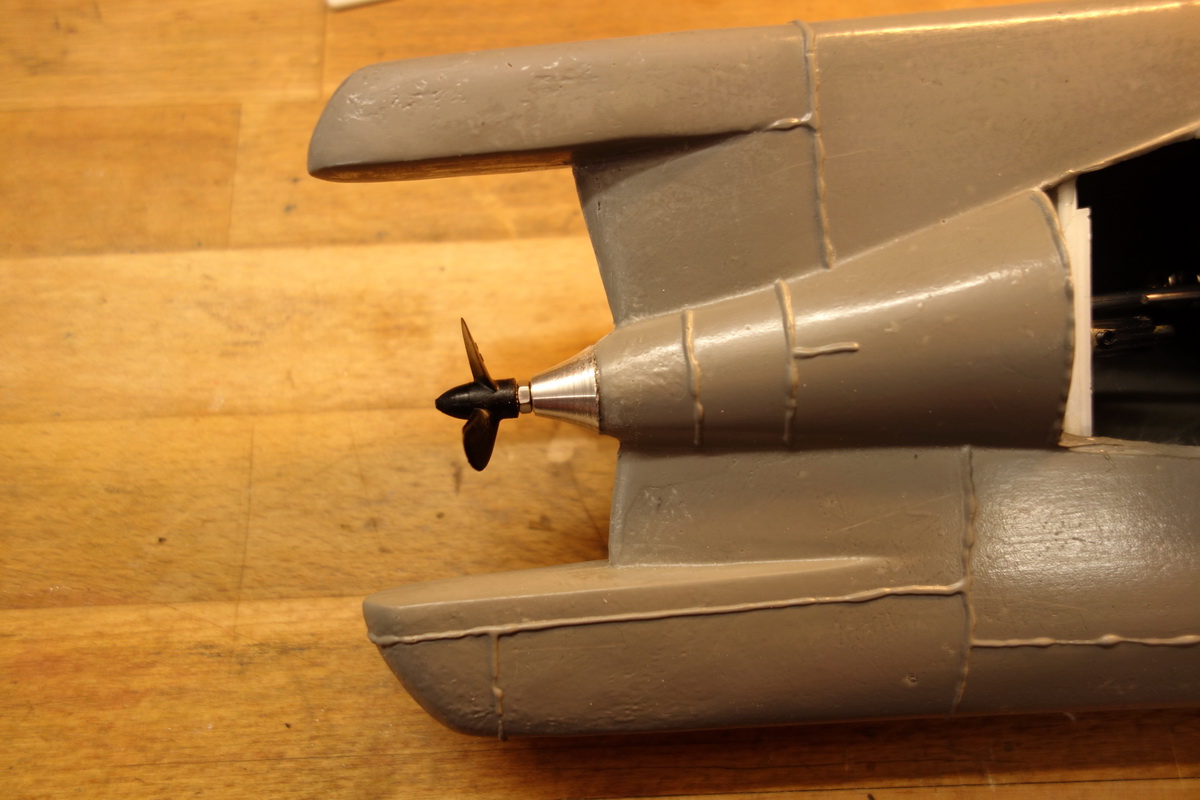
Und nun wurde es spannend. Die Schiffswelle musste sauber eingebaut werden damit ein paralleler Versatz von 6mm zwischen der Welle im Rumpf und der Antriebswelle aus dem Tauchgerüst entstand. Das Ganze sollte so sein, dass ich das Tauchgerüst aus dem Heck zu Wartungszwecken wieder ausbauen kann.
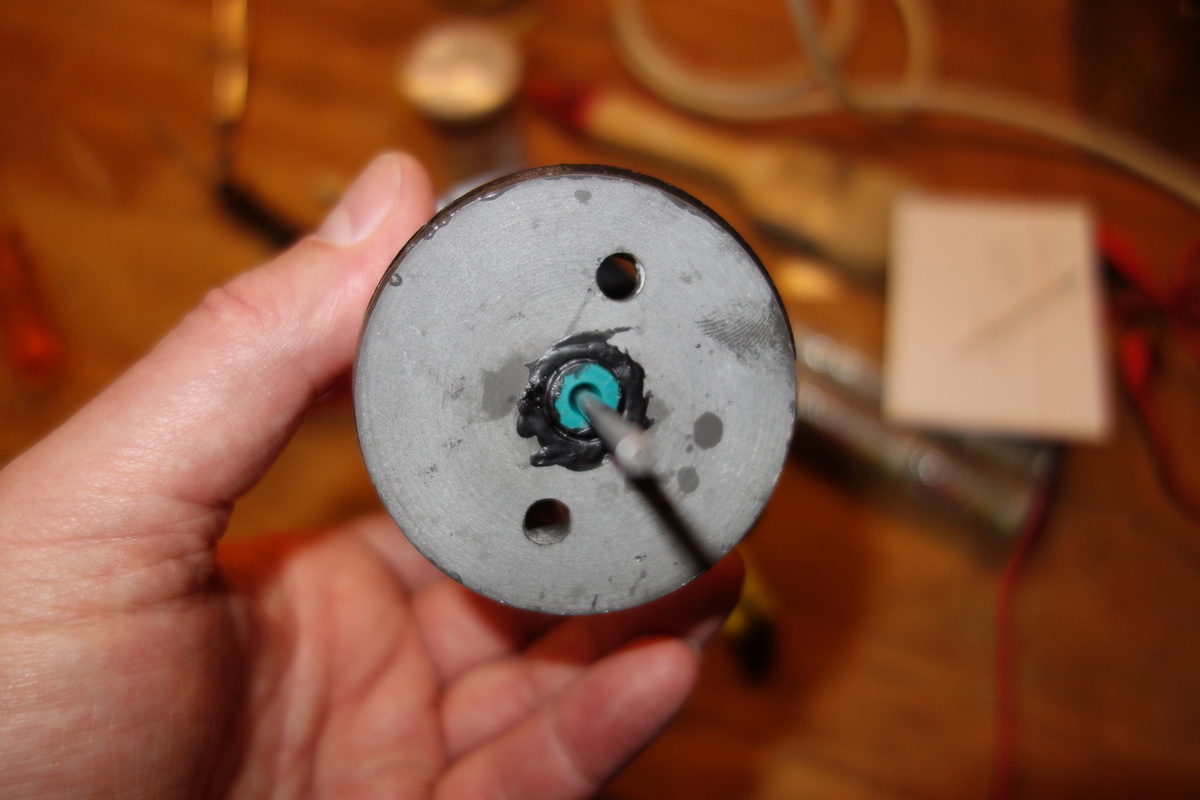
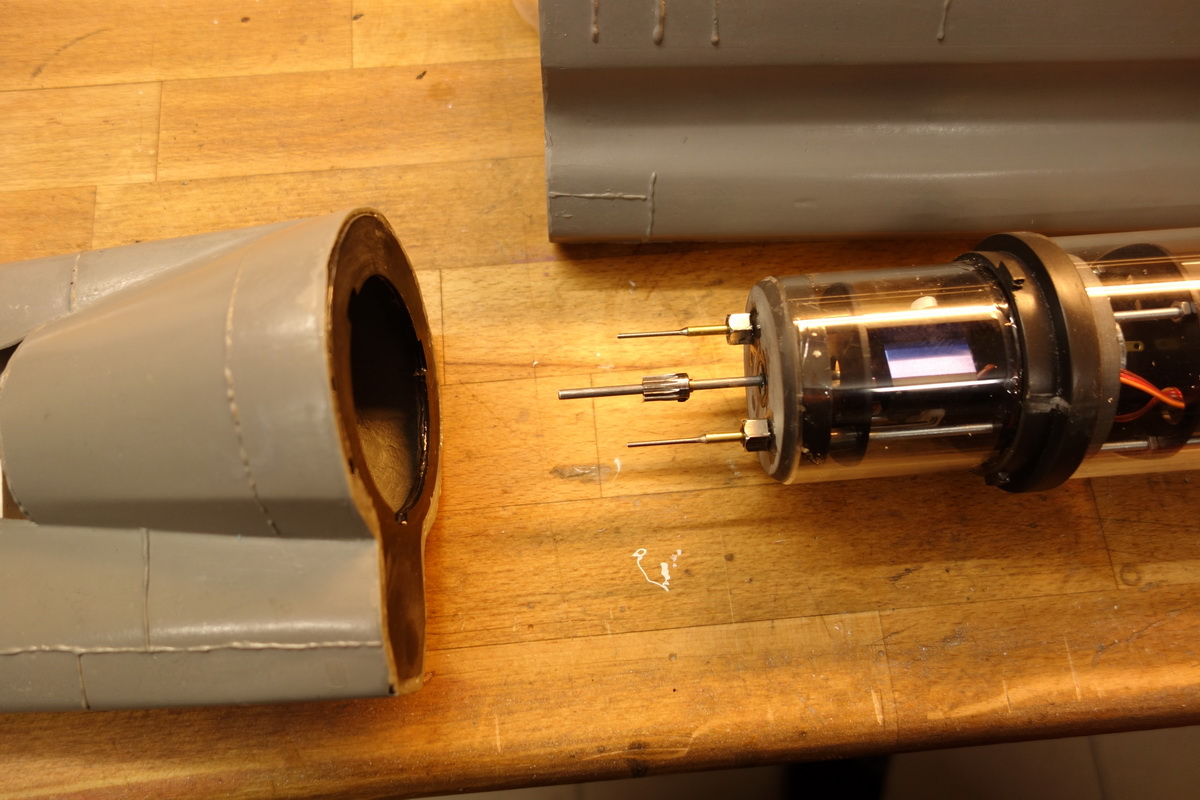
Um nun die Antriebswelle in das Heck einzubauen, hatte ich einen Spannt mit 2 Wellen-Lagern (aus Sinterbronze) gemacht die nass laufen (Bild 120). In einem Lager befindet sich nun die Welle zur Schiffschraube im Heck und senkrecht darüber mittig mit 6mm Abstand das Lager für die Antriebswelle aus dem Tauchgerüst. Auf beiden Wellen ist je ein Stahlritzel montiert, welche mit einer 1:1 Übersetzung einen Abstand von genau 6mm ergeben (Bild 130). Wenn man nun das Tauchgerüst mit der Antriebswelle in die Hecksektion einschiebt, gleitet die Antriebswelle in das Sinterbronzelager und die beiden Ritzel greifen ineinander. Da war ich mal gespannt, ob das im Praxis-Test wirklich funktioniert.
 |
 |
 |
| Bild 100 | Bild 110 | Bild 120 |
 |
 |
 |
| Bild 130 | Bild 140 | Bild 150 |
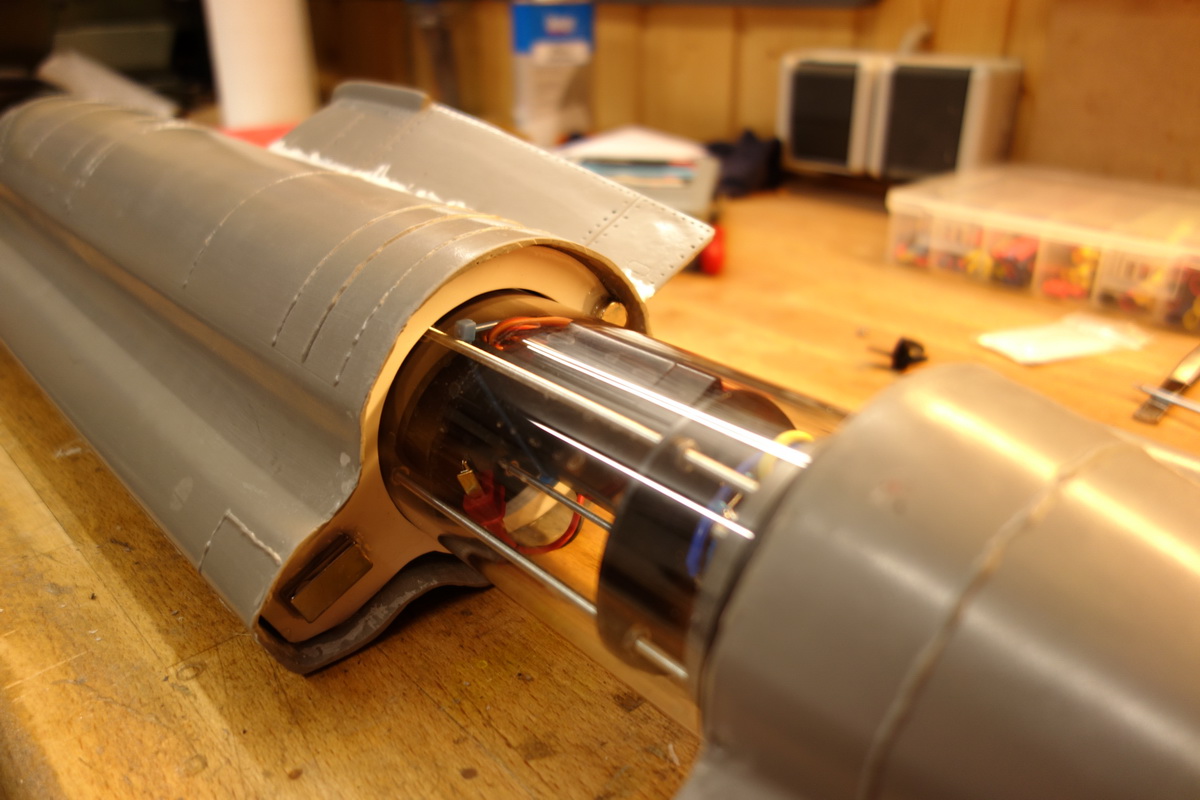
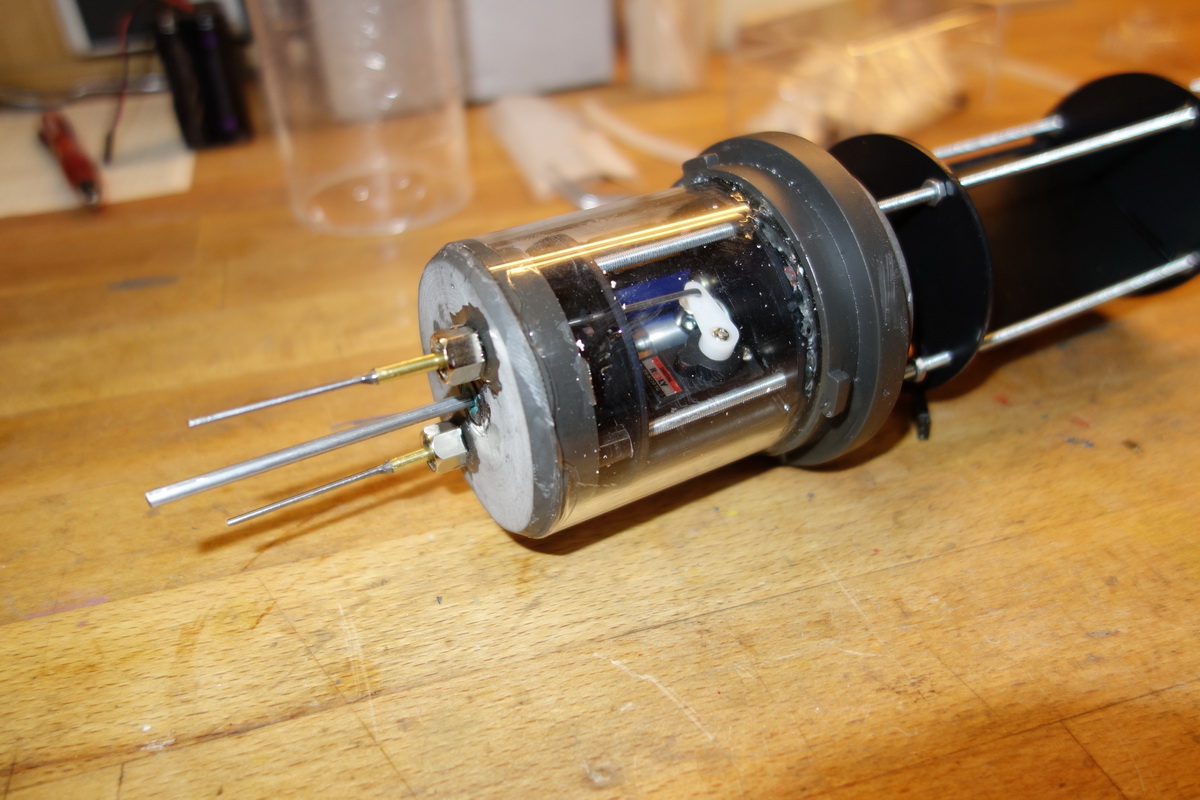
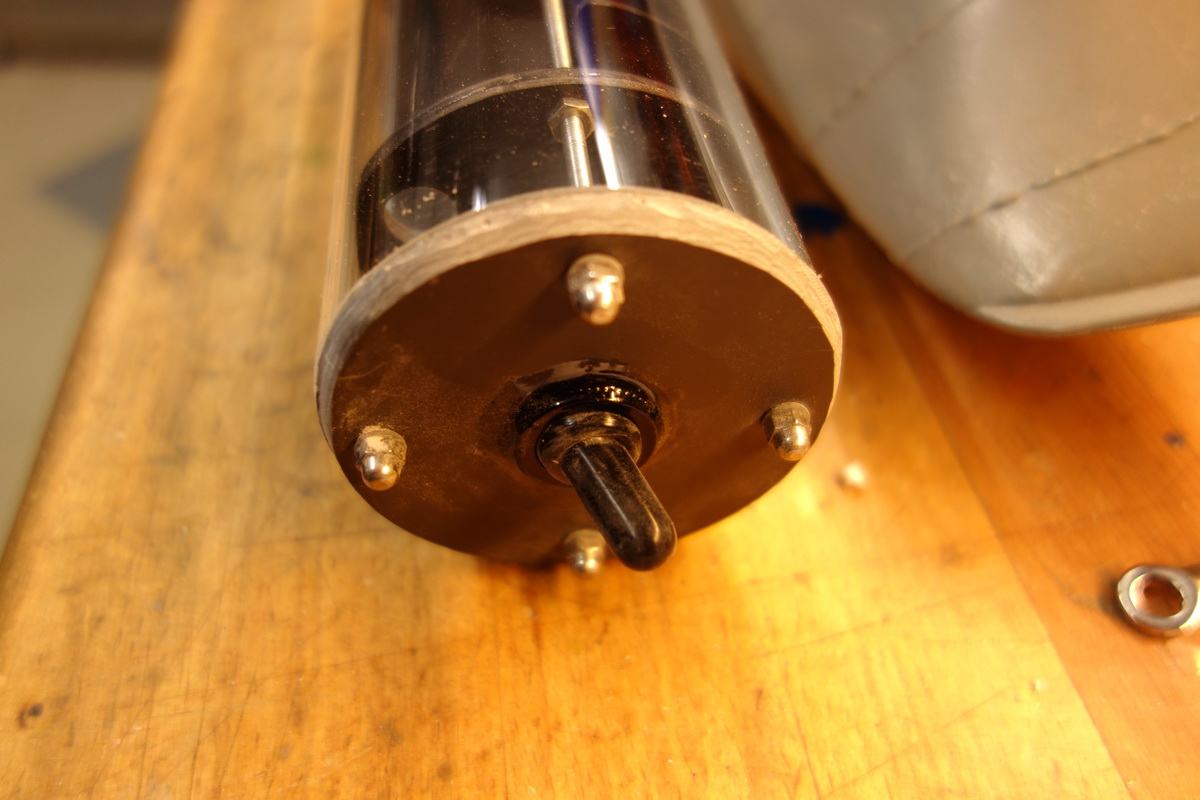
Bild 140 zeigt nun das fertige Tauchgerüst. Leider war der Bug-Deckel doch zu weit vorne im Boot und ist an den Rändern im Rumpf innen angestoßen. Damit ich das Technikgerüst weit genug in das Boot schieben konnte, musste ich den Rand außen am Bugdeckel schräg anschleifen, um mehr Tiefe im Bug zu gewinnen. Ich wollte die maximale Länge des Technikgerüstes ausnutzen. Deshalb wollte ich die Plexiglasröhre nicht um 5mm kürzen.
Auf Bild 150 sieht man auch gut den Schalter und die Dichtung der Gewindestange durch 4 Silikonteile im Bug-Deckel, die mit Hutmuttern den Bug-Deckel gegen das Rohr drücken und so alles wasserdicht verschließen.
- Details
Teil 4: Dez 2019 Der Turm
Nach langer Pause ging es jetzt mit neuem Schwung und einem konkreten Ziel weiter. Ich wollte nicht gleich wieder mit der Technik weiterbauen, sondern lieber am Rumpf weiter bauen. Also kam der Turm dran.
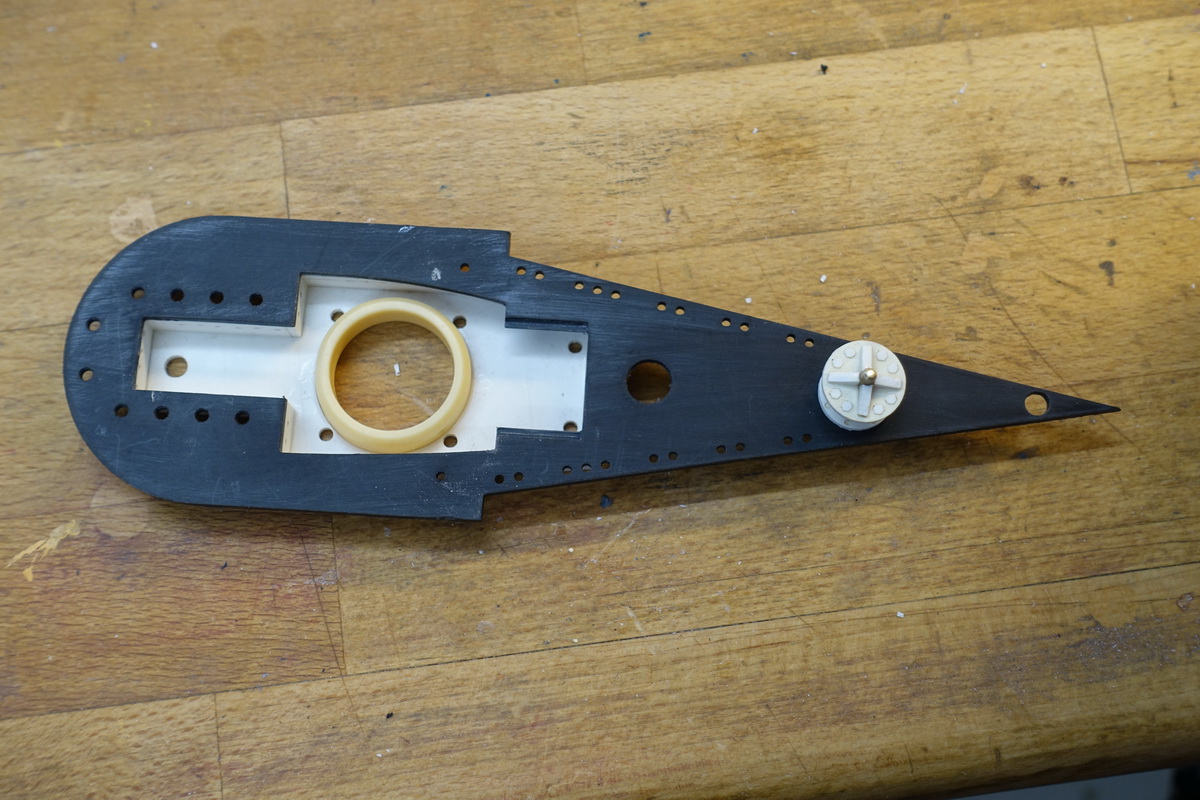
Der Turm bestand eigentlich nur aus dem Deck, dem Sehrohr, einem Magnet-Kompass und dem Schnorchel-Ventil dahinter. Die Teile stammen aus dem Frästeile-Satz, welchen mir Danny Engelhardt gefräst hatte (Eine CD mit den Fräsdateien war Bestandteil der Teile von Lapnet). Ich hatte die Teile mit Sekundenkleber zusammengeklebt und an den GFK-Rumpf angepasst.
 |
 |
 |
| Bild 210 | Bild 220 | Bild 230 |
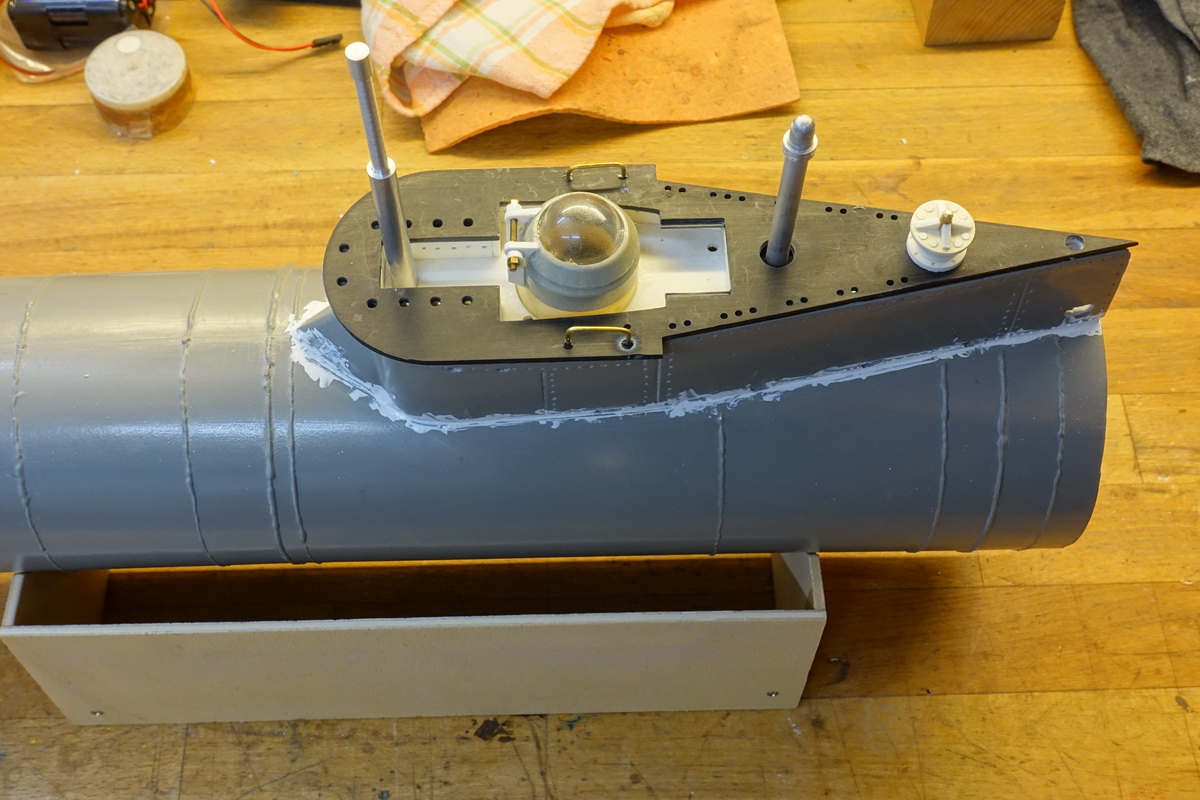
Aus Alu-Rundmaterial drehte ich auf meiner Drehmaschine das Sehrohr und den Magnet-Kompass. Einen Bauplan des Seehunds Typ XXVII im Maßstab 1:15 hatte ich mir in der Zwischenzeit gekauft. Aus dem konnte ich die Maße für die beiden Teile entnehmen. Das Sehrohr hat am unteren Ende ein Gewinde bekommen, welches ich mit einer Mutter im Loch vorne im Deck festgeschraubt habe. Der Magnet-Kompass steht mittig im Loch hinter dem Turmluk und hat einen Rand zum Deck. Um das hin zu bekommen habe ich unter dem Deck eine kleine Brücke gebaut und ebenfalls ein Gewinde unten an den Magnet-Kompass geschnitten. Der Magnet-Kompass wurde wieder mit einer Mutter unter dieser Brücke geschraubt.
Aus den Frästeilen und einem Messing-Rundteil wurde das Schnorchel-Ventil zusammengebaut und an die Stelle ganz hinten am Deck geklebt (Bild 240 - 260 in weiß). Nun wurde das Deck auf den GFK-Turm geklebt und das Deck mit dem GFK-Turm sauber verschliffen.
 |
 |
 |
| Bild 240 | Bild 250 | Bild 260 |
Das markanteste Teil am Turm ist das Turmluk. Ich wollte es so machen, dass man es öffnen kann, um vielleicht tatsächlich später dort eine Fahrerfigur platzieren zu können. Also machte ich vorne mit einer Messing-Gewindestange M1,5 und entsprechenden Messingschrauben ein Gelenk. In den Kreis wurde dann die Plexiglas-Kuppel mit UHU-Hart eingeklebt. Mit einem Messingdraht und einer Messingschraube als Lager habe ich einen Turmverschluss gebaut. Dieser lässt sich nun öffnen.
Als Abschluss bekam der Turm rechts und links vom Turmluk noch 2 Griffe aus Messingdraht.